
Data Smoothing : RC Filtering And Exponential Averaging
What are RC Filtering and Exponential Averaging and how do they differ? The answer to the second part of the question is that they are the same process! If one…

What are RC Filtering and Exponential Averaging and how do they differ? The answer to the second part of the question is that they are the same process! If one…

When using vibration data, especially in conjunction with modelling systems, the measured data is often needed as an acceleration, as a velocity and as a displacement. Sometimes different analysis groups require the measured signals in a different form. Clearly, it is impractical to measure all three at once even if we could. Physically it is nigh on impossible to put three different types of transducer in the same place.

The Prominence Ratio is a technique designed to see if there are any aurally prominent tones in a signal. Primarily, it is applicable where we have a noise source with…

Understanding filters is actually simpler than it may first seem. Creating a filter is another story; it’s like being able to drive a car without having to know the intricate…
A DATS user asked…
We are using the third octave band filter at very low frequencies (~1Hz) and I noticed that the response of the filter could introduce very significant errors for short or transient signals. Looking a bit more in details at the function, the help says:
“For audio work ISO standards use a reference frequency of 1kHz not 1Hz”
Does that implies that for non-audio work, a reference frequency of 1Hz should be applied? If yes, is it possible to change this reference frequency in the dats function?
Dr Mercer replied…
Essentially there is no problem and no need to change the reference frequency provided you use Base 10 mode and not Base 2. Base 10 is the ANSI S1.11-2004 preferred scheme. (more…)

For some time now it has been conventional ‘wisdom’ that using time based digital integration may cause amplitude errors in the result and that these get worse as the frequency increases. As a result of this, integration using Omega arithmetic has been prevalent by using Fourier Transforms of the signal. This, of course, remains a valid approach and is particularly useful if the data is already in the frequency domain, which was its prime purpose.

When one thinks of noise in a signal, it is generally associated with having been added in some way to the amplitude of a signal. This is not always the…

This seemingly simple question is actually quite fundamental. To answer the question we need to consider sound intensity. Now sound intensity is defined as “the average rate of flow of…

Normally when we are analysing a signal it is a purely real signal, that is it has no imaginary part. A classic example is of course a sine wave. When…

Creating a good quality tachometer signal is one of the hardest parts of analyzing rotating machinery. So what happens if we have missing tachometer pulses? The data looked great until we tried to perform some in-depth torsional vibration analysis. And now we no longer have the component or vehicle to retest it. Do we have to scrap the whole test? Was all that time wasted? Not necessarily…

It sometimes occurs that signals are captured with A-weighting applied to the data by the acquisition device. This can be a problem if, for example, you wish to use the data in a hearing test or to use it for a structural vibration analysis. Now, A-weighting allegedly mimics what the ear does to a signal. If we play back an A weighted sound then we perceive a double A-weighted signal which is clearly not intended. When doing structural work it is usually the lower frequencies, say 2kHz or less, that is generally required. A-weighting seriously attenuates the low frequencies and also applies gain above 1kHz.

These days most people collecting engineering and scientific data digitally have heard of and know of the implications of the sample rate and the highest observable frequency in order to avoid aliasing. For those people who are perhaps unfamiliar with the phenomenon of aliasing then an Appendix is included below which illustrates the phenomenon.
In saying that most people are aware of the relationship concerning sample rate and aliasing this generally means they are aware of it when dealing with constant time step sampling where digital values are measured at equal increments of time. There is far less familiarity with the relevant relationship when dealing with orders, where an order is a multiple of the rotational rate of the shaft. For example second order is a rate that is exactly twice the current rotational speed of the shaft. What we are considering here then is the relationship between the rate at which we collect data from a rotating shaft and the highest order to avoid aliasing.
The relationship depends on how we do our sampling as we could sample at constant time steps (equi-time step sampling), or at equal angles spaced around the shaft (equi-angular or synchronous sampling). We will consider both of these but first let us recall the relationship for regular equi-time step sampling and the highest frequency permissible to avoid aliasing. This is often known as Shannons Theorem [Learn more about Claude E Shannon].
(more…)
These are two different techniques aimed at different objectives. First consider a simple sinewave that has been sampled close to the Nyquist frequency (sample rate/2).

Visually this looks very pointy. We will examine it using a filter based interpolation and a classical curve fitting procedure to obtain a better representation.
Any vibration signal may be analyzed into amplitude and phase as a function of frequency. The phase represents fifty percent of the information so it is most important to measure phase for vibration monitoring. Most vibrations on a rotating machine are related to the rotational speed so it is clearly important to have a measure of the speed, either directly or as a once per revolution tacho pulse. A question sometimes arises as to whether a once per revolution tacho reference signal is needed to measure phase. Is it possible to get phase if we only have a speed signal? This note gives some insight into those questions.
Actually the question that should be asked is – “Can we measure a meaningful phase, for use in vibration monitoring, if we only have a speed signal as well as the vibration signals?”

Standards DIN 4150-2:1999-06 and DIN 45669-1:1995-06 provide a means of assessing the effect on human beings of vibration caused by vehicle traffic, trains both above and below ground, construction work and occasional impulsive type vibration caused by, say, blasting and the like.
DIN 45669-1 describes the signal processing actions and DIN 4150-2 details how these are used. Provisions are included for day or night levels and for five categories of building:
By combining a speed signal with a data signal and using the Short Time FFT algorithm (Hopping FFT), it is possible to extract order data directly as a function of time (Orders from Hopping FFT) rather than as a function of speed (Waterfall). This is very useful when analyzing a complete operational cycle which includes run ups, rundowns and periods at operational speeds.

The requirement was to develop a ‘standard’ test for assessing vehicle power steering pump noise (and sound quality). Measurements needed to be objective so that the method would be suitable…
Order cuts are taken from a set of FFTs, each one at a different rpm. The rms level is then found as the Square root of the Sum of the squares of each of the FFT values. Mathematically, if 


This takes into account the entire energy at that speed both the order and the non order components, including any noise.

Accelerometers are robust, simple to use and readily available transducers. Measuring velocity and displacement directly is not simple. In a laboratory test rig we could use one of the modern potentiometer or LVDT transducers to measure absolute displacement directly as static reference points are available. But on a moving vehicle this is not possible.
 In many cases only significant events, such as bumps or other transients in a signal are of relevance. The objective is to be able to isolate these events in a meaningful manner so that they may be automatically recognised and either removed or extracted for analysis in a structured way.
In many cases only significant events, such as bumps or other transients in a signal are of relevance. The objective is to be able to isolate these events in a meaningful manner so that they may be automatically recognised and either removed or extracted for analysis in a structured way.
There are two principle objectives initially: one is to be able to recognise an event and the other is to be able to mark it in some way so that subsequent software is able to operate on the actual event. We must also note that an event has a start and an end; the criterion we use to recognise the start may not necessarily be the same criterion we use to recognise the end. Searches for the start and end points are carried out on a Reference Signal. How the reference signal is formed is discussed in detail later, it includes the original signal, various running statistical measures such as the dynamic RMS, differentiation for slope detection, integration and so on. In many cases the start criterion will be some check on the level achieved by the reference signal. By the time any check level has been detected then it is almost certain that the event started earlier! That is, a pre trigger capability is essential.

The “standard” centre frequencies for 1/3 octave bands are based upon the Preferred Numbers. These date from the 19th century when Col. Charles Renard (1849–1905) was given the job of improving captive balloons used by the military to observe enemy positions. This work resulted in what are now known as Renard numbers. Preferred Numbers were standardised in 1965 in British Standard BS2045:1965 Preferred Numbers and in ISO and ANSI versions in 1973. Preferred numbers are not specific to third octave bands. They have been used in wide range of applications including capacitors & resistors, construction industry and retail packaging.

With shafts, gears and the like, the general method of determining the rotational speed is to use some form of tachometer or shaft encoder. These give out a pulse at regular angular intervals. It we have N pulses per rev then obviously we have a pulse every (360/N) degrees. Determining the speed is nominally very simple: just measure the time between successive pulses. If this period is Tk seconds and the angle travelled is (360/ N) degrees then the rotational speed is simply estimated by 360/(N*Tk) degrees/second or 60/(N*Tk) rpm.

This post discusses analyzing shaft twist and at the same time handling the less than perfect data that we have all come across.
A shaft has been instrumented with two shaft encoders, one at each end. Each shaft encoder gives out a once/rev pulse and a 720 pulses/rev signal. Each signal was digitised at 500,000 samples/second. The objective is to measure the twist in the shaft and analyze into orders. The test stand was already equipped with a data acquisition system so a Prosig acquisition system was not required. Instead it was decided that the data captured by the resident system would be imported into the DATS software. The only format available from the customer system was ‘comma separated variables’ or CSV. This is not ideal as it is an ASCII based format and therefore creates very large files.
(more…)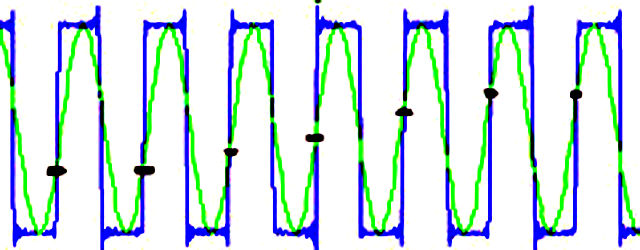
The following article was written in response to a question from a visitor to the website. The gentleman in question had been reading some of the Prosig signal processing articles and had the following question.
Dear Sir, It was interesting reading the articles in your mail.I would like to know the options available in hardware and/or software for measurement/calculation of phase angle of first harmonic of a vibration signal which is sinosoidal. The phase angle is the relative phase angle difference between the signal and the tacho - one into rpm signal. Regards. etc.
[latexpage]One would expect that averaging waterfalls and then extracting orders would give the same result as extracting orders from individual waterfalls and then averaging them. This is not the case.

