
When performing frequency analysis of vibration data for any application the resultant spectrum has both amplitude and phase components, therefore the phase component represents half of the information available and can provide a valuable insight into the causes of the vibration and possible methods for reducing it.
Phase is a measure of the relative timing between two signals. The phase angle (measured in degrees or radians) is the difference between a measurement point and a reference point in terms of a fraction of a cycle for the frequency being measured. At the specific frequency a single cycle will have a phase angle range of 360 degrees (or 
For rotating machinery in particular, phase is an important measurement and can be used for fault detection, balancing and many other diagnostics. In these applications the phase measurement needs to be referenced to a particular position within the rotation cycle for the machine usually by a dedicated tachometer or phase reference signal. This is can be provided by a proximity transducer looking at either a keyway slot or raised part of the shaft or by an optical transducer with a reflective strip on the shaft to produce a ‘once per revolution’ excursion. This signal can then be used as the reference point for all subsequent data capture and analysis for the vibration transducers associated with that shaft.
A typical example is shown below. In this example, we have two transducers on a rotating shaft. The transducer on the front face is measuring the motion of the shaft whilst the transducer on the rear face is looking at a keyway.

Assume the shaft has a ‘heavy spot’, this creates an imbalance and causes the shaft’s centre of mass to move away from the geometric centre. For this simple example the subsequent vibration signature will be sinusoidal and have a maximum amplitude as the heavy spot passes the transducer. The transducer on the rear face is looking at a keyway and will be used as the phase reference signal.
*Note, in practical applications this signal will not be as clean as that shown and may contain ‘ringing’ and glitches. Good quality conditioning of this signal will be required to provide the clean sharp signal required as a phase reference.
The following diagram shows the vibration signal and the associated phase reference for this example.

Here we have a sine-wave together with its associated tachometer signal. The falling edge of the tachometer is co-incident with the sine-wave passing through 0 in the positive direction – these points are highlighted as the phase reference points. Also highlighted is the maximum amplitude in the signal. We can see from this that there are two possible phase angle measurements – dependent on whether we consider the peak to be either ‘leading’ or ‘lagging behind’ the reference position.
*Remember that on the graph time is increasing along the X-axis and so a point which is further to right on the graph occurs later in time and so lags behind the reference. A point which is further to the left occurs earlier in time and so leads the reference point.
In this example the maximum peak occurs at ¼ of a cycle or 90 degrees after (or ¾ cycle and 270 degrees before) the reference point. Therefore the phase angle in this case can be expressed as either 90 degrees lag or 270 degrees lead.
*Remember also that phase angles are cycling and so +90 degrees is the same as -270 degrees and +270 degrees is the same as -90 degrees.
Therefore the possible phase angles for this example are:
| Phase Lag | Phase Lead |
| +90 degrees | 270 degrees |
| -270 degrees | -90 degrees |
Let’s look at how the Prosig DATS software represents phase by performing an FFT analysis on the example signal above. The following graphs (Figure 3) show the resultant complex spectrum and the equivalent modulus and phase representation.

The phase measurement produced by DATS is a value of 270 degrees . This shows that DATS is using the Phase Lead measurement definition.
*DATS provides the option of calculating phase over the range 

Another valuable display when dealing with complex frequency data is the Nyquist, sometimes called Vector or Polar display. This display is formed by extracting the real and imaginary (or modulus and phase) components for a particular frequency and displaying the real part as the X-axis and imaginary part as the Y-axis. This gives a display similar to that shown in Figure 4 below.

The point highlighted is the same point shown on the modulus and phase diagram above i.e. Ampitude 1.0 and phase 270 degrees.
Note using this convention for drawing nyquist diagrams then 0 degree phase is always at the 3 o’clock position. Some people prefer the 0 degree phase position to be a the 12 o’clock position, this is achieved by displaying the real part as the Y-axis and the imaginary are X.
The labelling of the phase position on the nyquist diagram depends on the phase angle definition being employed. The following are possible representations of the same vector position.

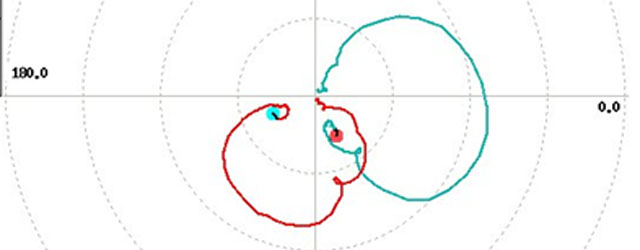
Nyquist displays are most commonly used in rotating machinery analysis where the complex components for an individual frequency or harmonic component of the rotational speed is extracted from successive data capture sequences, typically at different speed for a runup or rundown event.

The graph above is taken from a PROTOR system and represents the variation in the 1st order vector component for two signals from a steam turbine decelerating in speed from its running speed (3000 RPM) to stopped. The point highlighted is the vector position at high speed.
Nyquist diagrams readily show the amplitude and phase response for vibration harmonics for a rotating machine as it passes through critical speeds, these appears as loops in the vector plot as shown above.
In conclusion, the phase component of a complex frequency spectra contains valuable information and shouldn’t be ignored. When using phase you need to be aware of the reference signal being used and the phase angle definition being employed by the measurement system. Accuracy and stability of the phase measurement is dependent on the quality of the phase reference signal transducer and its target together with any signal conditioning used to identify phase reference points.
It is important to understand the phase readings being presented by a measurement system. As an example phase is an important measurement when attempting to balance a rotating machine. Referring to the example shown above where a heavy spot has been identified on shaft, maybe due to uneven mass distribution or damage or loss of a turbine blade, ideally the placement of an appropriate balance weight will be on the opposite side of the shaft to the heavy spot. That is, at a phase angle that is 180 degrees from the measured peak vibration phase angle. Incorrect interpretation of the phase angle will result in the balance weight being placed at the incorrect position, possibly resulting in an increase in vibration and not the desired decrease.
How Prosig Support Phase Measurements
DATS
- The P8000 data acquisition system contains dedicated tachometer channels with their own signal conditioning. The user may specify the tachometer trigger threshold level and the direction (+ve/-ve for rising/falling).
- DATS frequency analysis supports real and imaginary and modulus and phase outputs. Phase can be specified as being
or
- DATS supports amplitude and phase displays in either bode or nyquist form.
PROTOR
- The PROTOR data acquisition hardware contains supports multiple tachometer channels with dedicated signal conditioning. It also supports user specification of the trigger threshold level, trigger slope and also provides a variable re-trigger disable period.
- PROTOR calculates and stores vibration harmonic vectors in raw complex form. This allows the presentation of the phase data in the user defined format. This supports both Phase Lead and Phase Lag for
- PROTOR supports the display of amplitude and phase in Trend (bode) and Vector (nyquist) format.
- The vector plot also support different locations for the 0 degree phase position.
- Steady-state alarms can be defined to detect unexpected changes in phase by calculating elliptical boundaries around acceptable phase limits.
Don Davies
Latest posts by Don Davies (see all)
- Strain Gauge Basics – Part 2 – Shunt Calibration - February 26, 2024
- Bearing & Gearbox Vibration Analysis Using Demodulation Techniques (Part 1) - February 23, 2024
- Strain Gauge Basics – Part 1 - February 9, 2024



Phase data also provides equally important information in the non-rotating world.
At a resonance, it shows if structural components are moving in phase ( together and thus lower relative amplitude ) or anti-phase and higher relative amplitude.
If many measurements are made on a structure, comparing phase at resonance(s) will show if the structure is acting in linearly: the phases are consistently 0 deg or 180 deg from each other, or non linearly : the phases wander as you compare frequency response functions.
Regards,
Alex Pettit
Orlando FL
What Alex is talking about is the various resonances of the structure and the mode shapes thereof. It is too simple to explain by in phase and out of phase components. In a complex structure such as a steam turbine, the modes shapes are in fact three dimensional and hence difficult to show on a 2 dimensional plot. On turbines in general, if the phase is ‘wandering’ it means there is a rub. that produces a vector which is rotating about the end of the out of balance vector.
How to put the trail mass near to correction angle in dynamic balancing