

Operational Deflection Shapes (ODS) can be useful to view the vibration patterns of a structure. As its name suggests Operational Deflection Shape analysis shows the vibration pattern experienced during normal operational condition. This is different to other structural vibration tests such as impact hammer tests, bump tests or shaker tests which require a more controlled excitation force and are used to determine specific characteristics of the structure under test, such as natural or resonant frequencies. As Operational Deflection Shape analysis is performed with the structure in-situ the vibration patterns are not only influenced by the properties of the particular structure but also by the environment in which it is operating and the actual vibration forces it experiences.
For example, for a large rotating machine such as a turbine generator, fan or pump the excitation force is primarily caused by any imbalance present in the structure and the vibration pattern is influenced by the structure’s natural frequencies, the stiffness of the supporting bearings and the rotational speed.
In this particular example we will examine how ODS analysis can be used to view vibration patterns for a Gas Turbine and Generator machine. The machine consists of the following components as illustrated in Figure 1 below.

In total the machine has five bearings. Bearing 1 and 2 are before and aft the Gas Turbine/Compressor assembly. Bearing 3 and 4 are in-board and out-board of the generator and bearing 5 is after the exciter.
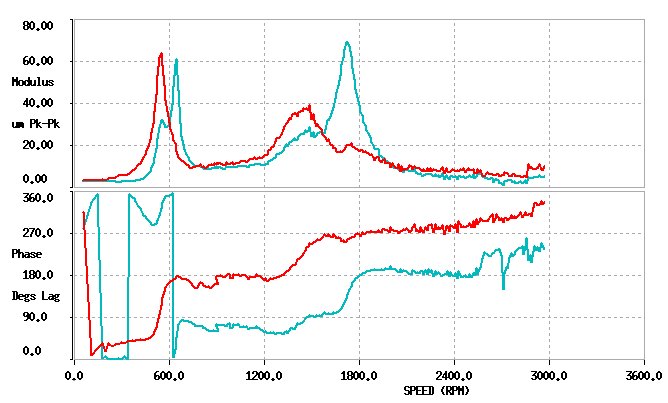
This particular machine and other associated components are monitored by a PROTOR online vibration monitoring system. This system is continuously collecting and analysing data from both shaft proximity probes in the X and Y directions at each bearing and from vertical and horizontal vibration probes mounted on the bearing pedestals. Data is analysed relative to a ‘once-per-revolution’ phase reference (or tachometer) signal which provides an accurate measure of rotational speed and is also used to synchronously sample the vibration data to provide high accuracy measures of the frequency harmonics of the rotational speed. The tachometer signal also ensures that these harmonics are ‘phase-locked’ to the same point on the rotational cycle of the shaft which is important when comparing data across channels. PROTOR collects data from these vibration sensors at all operational states from slow-roll barring through runup and rundown (coastdown) variable speed states to constant speed onload conditions. When observing rotor-dynamics of this type of machine, the vibration patterns during the variable speed states are most interesting as different frequencies are excited. The following graph, Figure 2, produced by PROTOR shows the variation in 1st Order amplitude and phase for the X and Y proximity probes for bearing 3 (generator in-board) during the run-up of the machine from 200 to 3000 RPM.
[Note, in practice the X and Y proximity probes are mounted at 45 degrees either side of the top of the bearing, PROTOR has resolved these into the true horizontal (X) and vertical (Y) components].
From PROTOR we can export this data into DATS format files. The resultant DATS file contains separate signals for the Modulus and Phase components for each transducer. Each signal contains the 1st order measurement at 10 RPM increments. With some simple manipulation this file is then suitable for use in the DATS structural animation package.
Within DATS we can use the structural animation editor to construct a very simple line model of the turbine-generator chain with a node for each bearing. For this simple model we have assumed that the bearings are equi-spaced along the shaft, see Figure 3. We have selected a geometry that matches our measurement direction annotation from PROTOR and so has Y vertical, X horizontal and so Z is along the shaft.
| Shaft Model Co-ordinates | |||
|---|---|---|---|
| Node | X | Y | Z |
| B1 | 0 | 0 | -200 |
| B2 | 0 | 0 | -100 |
| B3 | 0 | 0 | 0 |
| B4 | 0 | 0 | 100 |
| B5 | 0 | 0 | 200 |

We can then attach signals from the DATS file created by PROTOR to the X and Y directions for each of the bearing nodes in turn. As shown in Figure 4, we have selected node B1 and have associated the signal B1EX_ordp1 with the X-direction and B1EY_ordp1 with the Y-direction. We can do similar for each node in turn.

We can now run the structural animation program to show the model and the vibration patterns at each speed step in the run-up. The Structural Animation package contains many features and many presentation modes. The picture below, Figure 5, shows a typical window layout. On the left-hand side we have the component window at the bottom which shows the 5 nodes for our bearing locations. Above this, the data windows show the order traces for a selected bearing (in this case Bearing 3). Here we have chosen to show only the modulus component but we could easily show both the modulus and phase components.

On the right-hand side are four separate windows showing the structure and the vibration deflection from the front, side, top and user defined perspectives. The rotational speed from which the deflection data is computed is controlled by the scroll-bar at the bottom of the screen and is also shown by the position of the cursor in the data window.
[Note that the deflection data is greatly exaggerated relative to the size of the model to illustrate the vibration pattern. The user can select the amount of gain to apply to the deflection to give the most appropriate picture].
The deflection diagram shown from the top best illustrates the shaft movement in the horizontal direction, Figure 6.
[Note on this view bearing 1 is at the top of the picture].
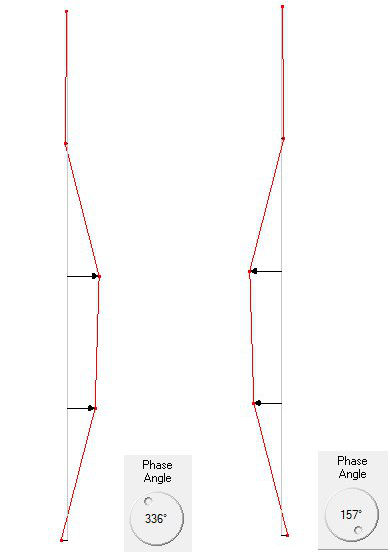
You can also add arrows to indicate the deflection direction relative to the centre line of the shaft. At the bottom of the page is a phase angle control button. You can use this button to show how the deflection pattern changes with phase. These diagrams show the extremities of deflection, on either side of the centreline with bearings 3 and 4 showing the most movement.
Similarly the deflection diagram when viewed from the side shows the vertical deflections.
In addition to manually rotating the phase the deflection shape can be animated by continuously cycling around in phase. As this is difficult to illustrate on paper the diagram below, Figure 7, shows the deflection when viewed from the side and where persistence has been turned on. This shows the deflections at various phase readings and so gives the impression of continuous rotation.

Most interestingly this illustrates an important concept in rotor-dynamics related to the so-called ‘critical speeds’ of a rotor. If you refer back to the main display of the Structural Animation window, Figure 5, we selected the rotational speed using the scroll-bar at the bottom of the screen. This also was highlighted by a cursor in the order trend data windows.
Now take a closer look at these order trends, in particular for the bearings either side of the generator (B3 and B4). The first diagram, Figure 8, shows the 1st Order Trends for Bearing 3, X-direction and Bearing 4, X-direction and the second, Figure 9, shows the two trends for the Y-direction signals.


The first thing to notice is that there are two predominant peaks in both the horizontal and vertical trends (as highlighted by the cursor line). Also note that the location in speed of these lines is slightly different between the horizontal and vertical responses. These peaks are known as the first and second criticals. They are related to the natural frequencies of the structure, in this case the generator rotor, but their location is greatly influenced by the bearing stiffness. The different location for the horizontal and vertical directions is due to differing bearing stiffness in the horizontal and vertical directions.
Not by co-incidence the bearing deflection shapes shown above, in Figures 5,6 and 7, were at a selected speed close to the 1st critical of the generator (around 500 RPM in the horizontal direction and 650 RPM in the vertical). As shown below, when we look at the deflection shape around these speeds we see that the deflection for bearing 3 and 4 are in the same direction, that is they are in phase with each other.

The animated picture of this deflection, as shown in Figure 7 above, shows why this mode is sometimes referred to as the ‘cylindrical mode’ as the deflection shape transcribes a cylinder.
If we now look at the deflection shapes, shown in Figure 11 below, in the vicinity of the 2nd critical (around 1460 RPM horizontal and 1730 RPM vertical) we see that the deflections for bearing 3 and 4 are in the opposite direction and are out-phase with each other.

The animated mode shape as shown in Figure 12 now resembles an hour-glass and the mode is referred to as ‘conical’.

Other interesting displays can be obtained by viewing just the deflection points at each bearing location at a particular speed and by varying the phase. These deflection points transcribe the ‘orbit’ of the vibration at each location. Remember that the data we have used here represents the 1st order vibration only and so the orbit is the ‘filtered’ 1st Order orbit. If we show this data at a user selected perspective, viewed along the shaft we see the individual orbits for each bearing – see Figure 13 below

If we view the data from the ‘front’ of the machine we see all bearing orbits superimposed, see Figure 14 below. These are the same as the individual orbit traces we are used to seeing in the PROTOR system.

Don Davies
Latest posts by Don Davies (see all)
- Strain Gauge Basics – Part 2 – Shunt Calibration - February 26, 2024
- Bearing & Gearbox Vibration Analysis Using Demodulation Techniques (Part 1) - February 23, 2024
- Strain Gauge Basics – Part 1 - February 9, 2024



Hello Don,
I sent you invitation in LINKEDIN. Regarding Newton Fund México-UK, Cardiff University Gas turbine center and my Lab plus a large mexican company are already in. Neverheless I would like to know:
1.- Do you know about a UK company (can be micro, small, medium, large) in the turbine bussiness in design, re-design, shop, repair, etc, who would be interested on joining us for a project regarding technology development, patent application to burn trash-fuel or bio’s of interest in UK?
2.- Your kind opinion regarding the associated rotordynamic problems caused/induced by using such gas-fuels? that is, research on how to identify this kind of problems, its magnitude or implications of such harms? Naturally due to potential thermoacoustic instabilities resonances, most likely torsional vibration and resonances might show up; but I would like to know further problems you have heard.
My email is gomezmancilla@gmail.com and I am the Head of the Vibrations & Rotordynamics Lab in ESIME IPN the second largest university in lationamerica (110,000 profesional and graduate students).
Looking forward hearing from you soon I send you my regards
Sincerily
Prof. Gomez Mancilla