Averaging Frequency Response Functions From A Structure
The following was written by Adrian Lincoln in response to a customer asking about averaging Frequency Response Functions (FRFs) Further to your reply it should be noted that there is…

The following was written by Adrian Lincoln in response to a customer asking about averaging Frequency Response Functions (FRFs) Further to your reply it should be noted that there is…

Seismic Qualification Testing for US Nuclear Power Generating Stations Part 1 (Random Vibration Testing) The nuclear power industry in North America (USA, Canada & Mexico) requires seismic qualification testing for…

Operating Deflection Shape (ODS) analysis is a method used for visualisation of the vibration patterns of a machine or structure caused by unknown operating forces. This is different from the study of the…

The term synchronous data is usually applied to vibration or acoustic data that is captured from an item of rotating equipment at regularly spaced angle intervals as distinct from regularly spaced time intervals. The rotating part could be an engine, a gear wheel, a drive shaft, a turbine rotor, a propeller, a turbocharger or any other type of rotary mechanical device. Typically these items are subjected to out-of-balance forces that cause them to vibrate at frequencies that are multiples of the fundamental (once per revolution) rotation speed frequency. (more…)

In one of our recent articles a question was asked regarding the practical use of real & imaginary type plots compared with modulus & phase type plots. In general, noise…
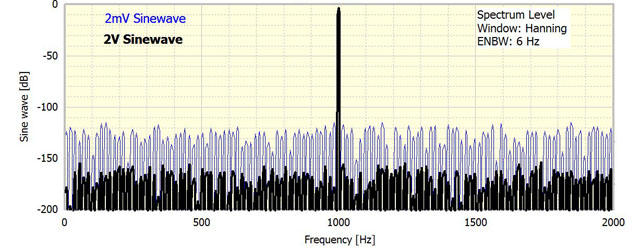
At least one manufacturer of data acquisition systems claims to achieve an incredibly high dynamic range (160dB) when capturing data. This is supposedly achieved by the use of dual-range data acquisition architecture. Such systems have two analog-to-digital convertors for each input channel; one of the ADCs captures the full voltage range of the input signal and the other ADC captures the input signal only when it is small. This article explains the facts behind the figures and shows that the use of Dynamic Range as a measure of precision can be misleading.
 This note is based on a real requirement presented to Prosig by a prospective user. It’s the sort of challenge that we relish. This case is a great example of a real-world signal processing requirement and also great test of some of the unique features of Prosig’s DATS software. It also shows the power and flexibility of the new DATS V7.0 worksheets.
This note is based on a real requirement presented to Prosig by a prospective user. It’s the sort of challenge that we relish. This case is a great example of a real-world signal processing requirement and also great test of some of the unique features of Prosig’s DATS software. It also shows the power and flexibility of the new DATS V7.0 worksheets.

 Knowing how to measure torsional vibration is of key importance in the area of vehicle development and refinement. The main contributory source is the engine where periodically occurring combustion cycles cause variation in the crankshaft rotary vibration. This vibration is transmitted to and modified further by other components in the powertrain such as the gearbox and by other equipment driven off the drive belt or chain. Additional torsional vibrations are also likely to appear downstream at the drive shafts and wheels.
Knowing how to measure torsional vibration is of key importance in the area of vehicle development and refinement. The main contributory source is the engine where periodically occurring combustion cycles cause variation in the crankshaft rotary vibration. This vibration is transmitted to and modified further by other components in the powertrain such as the gearbox and by other equipment driven off the drive belt or chain. Additional torsional vibrations are also likely to appear downstream at the drive shafts and wheels.

It is quite straightforward to apply “classical” integration techniques to calculate either a velocity time history from an acceleration time history or the corresponding displacement time history from a velocity time history. The standard method is to calculate the area under the curve of the appropriate trace. If the curve follows a known deterministic function then a numerically exact solution can be found; if it follows a non-deterministic function then an approximate solution can be found by using numerical integration techniques such as rectangular or trapezoidal integration. Measured or digitized data falls in to the latter category. However, if the data contains even a small amount of low frequency or DC offset components then these can often lead to misleading (although numerically correct) results. The problem is not caused by loss of information inherent in the digitisation process; neither is it due to the effects of amplitude or time quantisation; it is in fact a characteristic of integrated trigonometric functions that their amplitudes increase with decreasing frequency.
